Creation of advanced mechatronics systems through robotics and haptics
Robotics & Haptics Laboratory
Faculty

ENDO Takahiro
Department of Mechanical Engineering
Professor
- TEL:
- 0258-47-9716
Specialties
1. Robotics
2. Haptics
3. Control engineering
4. Mechatronics
Research areas
Our laboratory researches theories and technologies related to the control and development of advanced mechatronics systems. In particular, we focus on robot control and haptics, including the guidance control of a robotic swarm composed of multiple robots and the development of systems to enhance human haptic perception or support motor learning (skill transfer). We are interested in various objectives, from artificial objects like machines to non-artificial objects like humans.
Main facilities
multi mobile robots, motion capture system, flexible robot system, enhancing haptic perception system, motor control (motor training) system, haptic interface, mechanical stimulator, electrical stimulator.
Forte of this laboratory's study
1. Control Technology for a robotic swarm consisting of multiple robots
2. Control technology to suppress vibrations of flexible robots.
3. Technology to enhance haptic sensation at human fingertips.
4. Technology to develop systems learning movement and skills.
5. Technology to present haptic sensation to humans.
6. Control technology for mechanical systems.
Achivements/proposals via industry-academia collabolations
Our laboratory has experience in collaborative research on the development and control of robots, mechanical systems, and haptic interfaces.
Areas interesting to interact with
・Development and control of robots and mechanical systems
・Improvement and utilization of various robot systems
・Development and application of systems related to haptics
・Enhancement of human haptic sensation
・Utilization of haptics in XR
Message
Our laboratory researches various objectives, from artificial objects like machines to non-artificial objects like humans. Using these technologies, we offer consultations and proposals for various inquiries and needs.
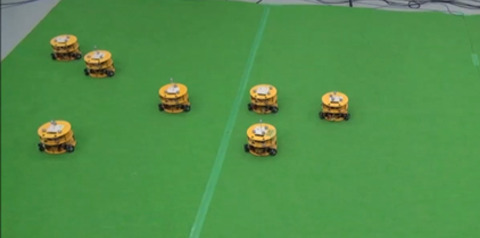 Distributed guidance for robotic swarm
Distributed guidance for robotic swarm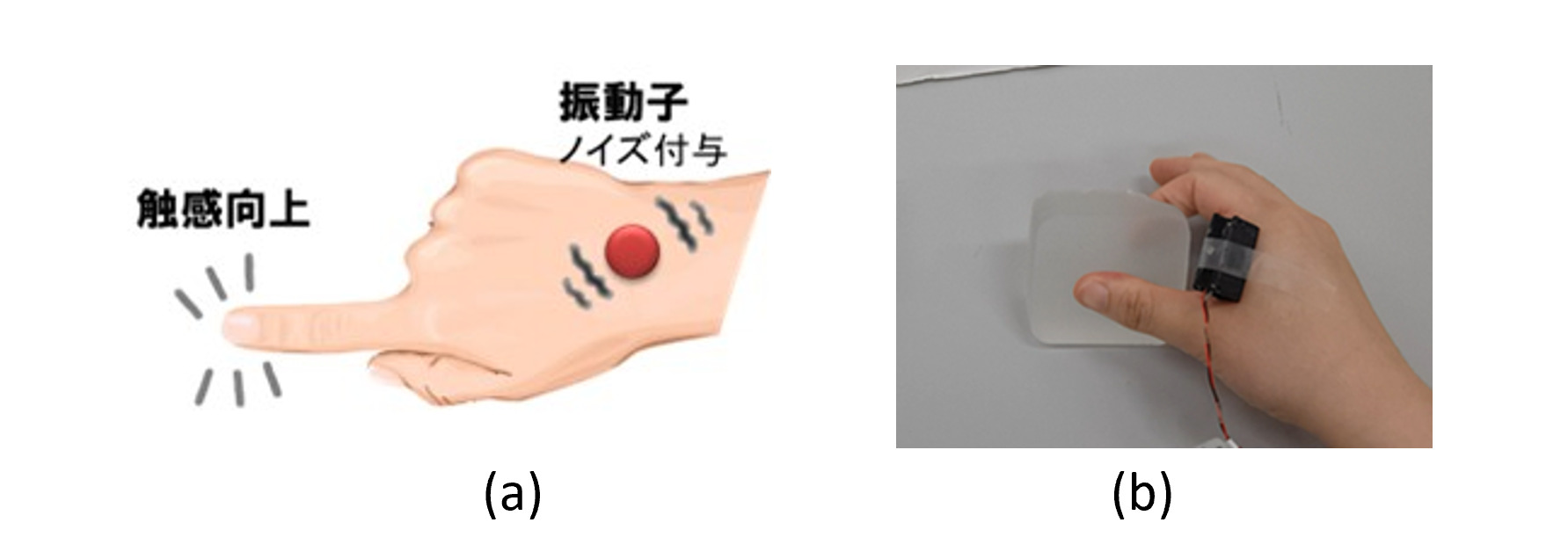 Enhancing haptic perception at human fingertips
Enhancing haptic perception at human fingertips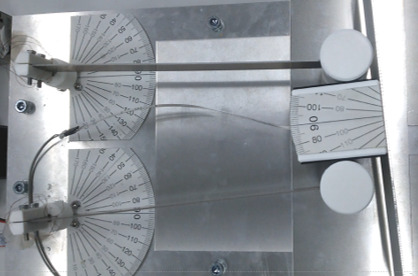 Grasping and manipulation of an object by soft robotics
Grasping and manipulation of an object by soft robotics VR motor learning system
VR motor learning system