制御とパワエレによるロボット・モーションコントロール・メカトロニクスの先端研究!
モーションコントロール研究室


- 技術シーズカテゴリー
- エレクトロニクス
- キーワード
- 遠隔ロボット・遠隔操作、サーボシステム、システムエンジニアリング、制御工学、パワーエレクトロニクス、メカトロニクス、モーションコントロール、モータドライブ、力覚・触覚センシング、ロボット、
研究室教職員

横倉 勇希YOKOKURA Yuki
電気電子情報
准教授
- TEL:
- 0258-47-9566
- FAX:
- 0258-47-9500
- 研究者詳細
専門分野
1.電気電子工学:パワーエレクトロニクス、電気機器
2.システム・制御工学:制御工学、ロボット工学、メカトロニクス
研究分野
1.産業用ロボットのモーションコントロール
2.高いバックドライバビリティ(高逆駆動性)を持つ広帯域力制御
3.多関節ロボットの位置と力のハイブリッド制御
4.産業用ロボットのための手先位置と力加減の直接教示・再現
5.ACモータの高速電流制御・トルク制御・センサレス制御・ロバスト制御
6.ハイブリッド自動車の低燃費走行制御
7.モータドライブ用インバータの高効率・低歪み変調方法の開発
8.機械共振振動の抑制制御
9.力制御・加速度制御のための制振制御
10.バイラテラル遠隔操作ロボット
主要設備
産業用ロボット(6軸6kg可搬)×2台、研磨・研削用ロボット(3軸)×1台、バイラテラル遠隔操作用ロボット(3軸)×2台、バイラテラル遠隔操作用ロボット(6軸)×2台、双腕ロボット(15軸5kg可搬)×1台、IM-IPMSMモータ試験装置×1台、パワートレイン試験装置×1台、HILS試験装置×1台、2慣性共振系モータ試験装置×2台、デジタルオシロスコープ、FRA測定装置、ロジックアナライザ、パワーメータ、インバータ制御試験装置
得意とする技術
1.触覚・力覚フィードバック制御技術
2.メカトロニクス機器、ロボティクス機器、FA機器の加速度制御ベースのモーションコントロール技術、力
制御技術
3.ACモータによる高速・高精度なトルク、速度、位置制御と位置・速度センサレス制御の開発
4.マイクロプロセッサ・DSP・FPGAを活用した高機能なディジタル制御システムの設計と実現
5.静止摩擦、動摩擦、ヒステリシス現象、飽和現象などの機械及び電気の非線形現象のモデル化と制御法の開発
6.共振振動、機台振動、トルクリップル、電流リップルなどの振動現象のモデル化と制御法の開発
産学官連携実績・提案
・産業用ロボットのダイレクトティーチ制御
・PMモータの超高速位置決め制御
・力センサ無しでの力覚フィードバック制御技術による低コスト力制御ロボット
・インバータの高力率・高効率化、位置・力ハイブリッド制御
・人間の動作の保存と再現
・2慣性共振系のねじれトルク制御、負荷側加速度制御
交流を求めたい分野
1.ACモータによる高速・高精度なトルク、速度、位置制御と位置・速度センサレス制御の開発
2.触覚・力覚フィードバック制御技術、保存再現技術の応用
3.各種メカトロニクス・ロボティクス機器・FA機器の高機能制御の開発と実現
特に、産業用ロボット、搬送機器、NC機器、ベルト駆動システム、ボールネジ駆動システムなどに注目しています
4.難解な制御対象の構造をモデル化する技術とその制御法の解明
特に、飽和、振動、バックラッシ、ロストモーション、量子化誤差、角度伝達誤差などの非線形要素を含む
機械システムに注目しています。
5.単相三相インバータの高力率・高効率化
メッセージ
上記の技術開発であれば、いつでもご相談に応じます。
Linux上で動くリアルタイム制御フレームワークARCS6を研究室で独自開発しています。
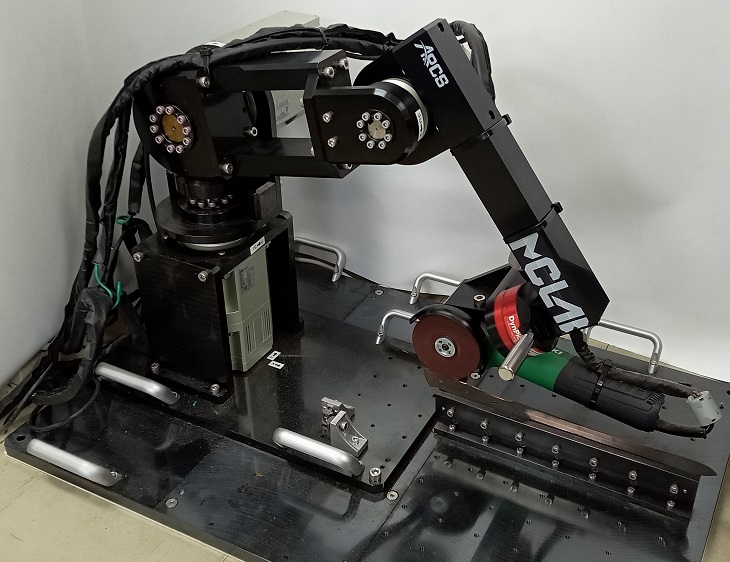 図1 独自開発の研磨用産業用ロボット
図1 独自開発の研磨用産業用ロボット 図2 独自開発の全関節トルクセンサ付き6軸産業用ロボット
図2 独自開発の全関節トルクセンサ付き6軸産業用ロボット