開放特許抄録集機械関係
整理番号:0122
アクチュエータ制御装置およびアクチュエータ制御方法
産業用ロボット、工作機械、自動車、医療技術等、各種アクチュエータの加速度制御
発明者
- 大石 潔
- 桂 誠一郎
- 加藤 将
発明の目的
ロバスト加速度制御系に基づき、アクチュエータのトルク飽和時に指令値に対して遅れのない軌跡追従制御を各軸間で行ないつつ、協調動作を行なうことが可能なアクチュエータとすることを目的とします。
概要
本発明のアクチュエータ制御装置は、各軸を駆動する複数のアクチュエータ個々に制御するもので、前記アクチュエータへの外乱を推定する外乱オブザーバを備え、この外乱オブザーバで得た外乱推定値を外乱補償電流に変換し、前記外乱補償電流でフィードバック補償した前記アクチュエータへの電流参照値に対応して最適なロバスト加速度制御を行います。
特徴・効果
本発明によれば、ロバスト加速度制御に基づき最適なフィードフォワードトルク電流指令の修正を行なうと共に、多軸系システムにおける強調動作を同時に、しかも軌跡誤差を発生することなく正確に軌跡追従を行なうことが可能です。
また、ロバスト加速度制御に基づいたトルク飽和対策を行なうことにより、従来技術の壁を大きく越えた高精度な軌跡追従制御が可能となり、現在産業界で実現されている各種工作機械やロボット制御に対する、生産技術におけるモーションコントロールを一新することが可能です。
発明の詳細・図面等
【特許請求の範囲】
各軸に可動する複数のアクチュエータの動作を個々に制御するアクチュエータ制御装置であって、前記アクチュエータへの外乱を推定する外乱オブザーバを備え、この外乱オブザーバで得た外乱推定値を外乱補償電流に変換し、前記外乱補償電流でフィードバック補償した前記アクチュエータへの電流参照値により、当該アクチュエータをロバスト加速度制御する加速度制御部と、前記アクチュエータを軌跡追従制御させるために、フィードバック成分の電流参照値とフィードフォワード成分の電流参照値を算出する軌跡追従制御部と、前記フィードバック成分の電流参照値、前記フィードフォワード成分の電流参照値、および前記外乱補償電流を合計した前記アクチュエータへの電流参照値を、予め設定した最大電流値以下に制限するために、何れか一つの軸で前記アクチュエータへの電流参照値が前記最大電流値を越えて電流飽和を起こすと、全ての軸で位置指令の調整率をそれぞれ算出し、この軸毎の調整率の中から前記電流飽和の許容分が一番大きな軸に対応した最小値の調整率を用いて、軸毎に前記フィードフォワード成分の電流参照値を調整する電流リミッタと、前記電流リミッタから与えられる前記最小値の調整率から、前記フィードバック成分の電流参照値および前記フィードフォワード成分の電流参照値を修正する調整部と、をそれぞれ備え、前記i軸目のフィードバック成分の電流参照値をIFBi、前記i軸目のフィードフォワード成分の電流参照値をIFFi、前記i軸目の外乱補償電流をIRBi、前記i軸目のアクチュエータへの電流参照値をIiref、前記最大電流値に相当し、前記アクチュエータを構成するモータの最大トルク電流をIMAXとしたときに、前記各軸の電流リミッタは、前記i軸目のアクチュエータへの電流参照値Iirefの絶対値が最大トルク電流IMAXを越えていれば、前記ロバスト制御を維持するための前記i軸目の現サンプルnの最大加減速トルク電流IaccMAX(n)iを次の式で算出し、i軸目の最大加速度を算出して前記位置指令の前記調整率を算出し、次いで前記i軸目のアクチュエータへの電流参照値の絶対値が最大トルク電流未満である場合は、前記位置指令の前記調整率iを1にするものであることを特徴とするアクチュエータ制御装置。
(※数式は省略)
$00A0
【詳細】
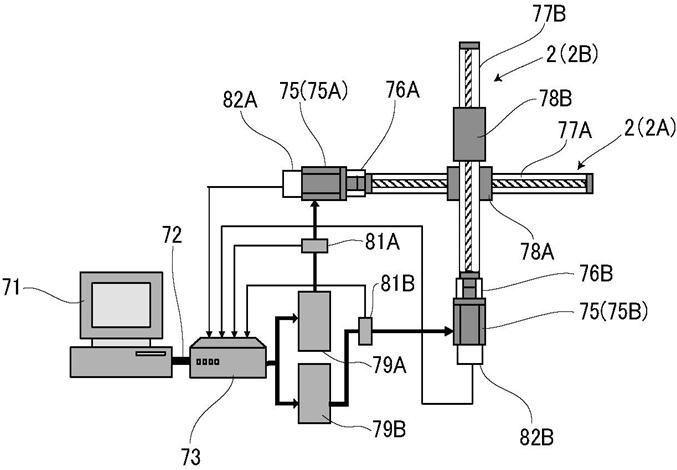
例えば、図に示す多軸系の実験システムで、コンピュータ71には予めアクチュエータ制御装置としてのロバスト加速度制御に基づく軌跡追従制御系のアルゴリズムが組み込まれており、AD変換ボードや、カウンタボード、DIO(ディジタル入出力)ボードなどを備えたPCIバス72を介して入出力インターフェースであるPCIバスブリッジ73に接続します。
一方、2つのアクチュエータ2A,2Bはテーブル78をX方向とY方向に沿って移動させるもので、このうちX軸用のアクチュエータ2Aは、駆動源であるACモータ75Aの回転軸に継手76Aを介してボールスクリュー77Aに、Y軸用のアクチュエータ2Bも駆動源であるACモータ75Bの回転軸に継手76Bを介して連結しテーブル78Bを駆動します。
そして、前記各テーブル78A,78Bはコンピュータ71からの制御信号により予め組み込まれたプログラムにしたがってX,Yの2軸に沿って駆動・制御されます。なお、79はインバータ、81は電流センサです。
$00A0
多軸系の実験システムの一例
ライセンス情報
- 特許登録番号
- 第5002814号
- 登録日
- H24年6月1日(2012年)
- 権利満了日
- R8年3月5日(2027年)
- 実施許諾
- 可
- 権利譲渡
- 否
事業化情報
- 実施実績
- 無し
- 許諾実績
- 無し
特許に関するご質問は、お問い合わせ票をご利用ください。
お問い合わせ票 ダウンロード